روبات های دوپایی که به کمک معلولین حرکتی خواهند آمد

روبات ها روز به روز به جنبههای مختلف زندگی ما وارد میشوند. استفاده از روباتها برای ساخت اندامهای مصنوعی یکی از کاربردیترین روشهای استفاده از این پدیده است.
متن زیر از زبان یکی از کارکنان آزمایشگاه Amber Lab است:
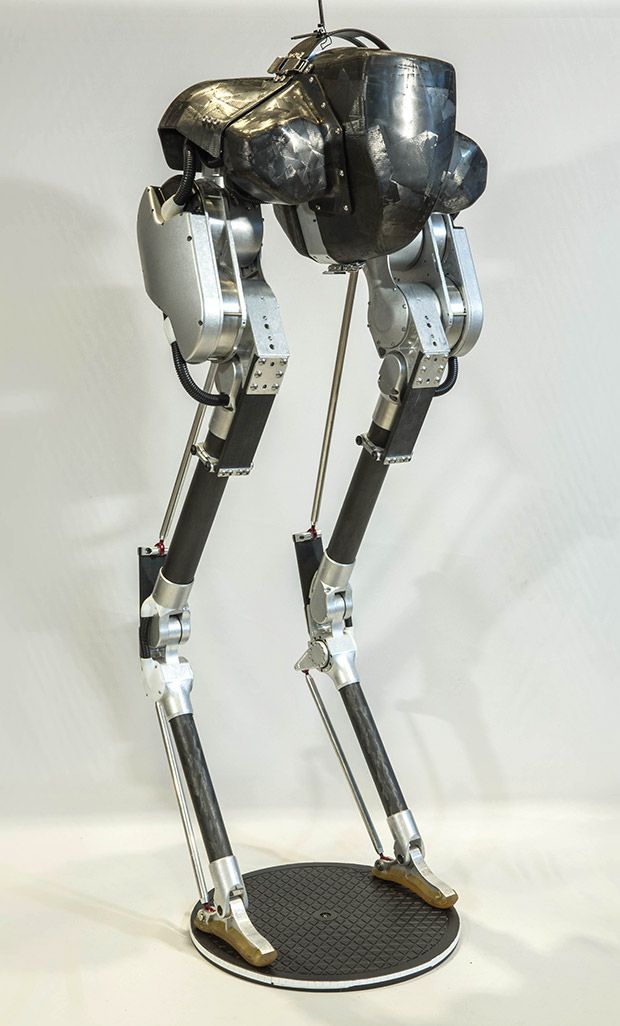
تماشای افتادن و زمین خوردن یک ربات حقیقتا برای من صحنه دردناکی است، اما بدتر از آن این است که من مسئول این اتفاق هستم. ما در آزمایشگاهی تحقیقاتی پر از روباتهای دوپا در پاسادینای کالیفرنیا هستیم. یکی از محققان از من میخواهد تا سعی کنم یک روبات ۱۸۰ سانتیمتری و نیمه انساننما به نام امبر که در حال راه رفتن بر روی یک تردمیل است را هل دهم تا بیفتد. این روبات با یک طناب به سقف بسته شده و در حال درجا زدن است؛ اگر من آن را با قدرت خیلی زیاد هل بدهم تنها امکان افتادن آن از عقب یا جلو وجود دارد.
با وجود آن که میدانم این روبات نمیتواند چیزی احساس کند اما باز هم به نظرم ظالمانه میاید اما در هر حال دستم را دراز میکنم و پای راست Amber را هل میدهم و مشاهده میکنم که چگونه تعادل خود را از دست میدهد؛ اما سپس به شکل عجیبی تعادل خود را به دست میآورد و به راه رفتن ادامه میدهد، گویی که هیچ اتفاقی نیفتاده است. سپس بالاتنهاش را با یک خط کش بزرگ فلزی هل میدهم اما باز هم به حالت عادی بازمیگردد.
این فرآیند شاید کمی ظالمانه به نظر برسد ولی محققان در Caltech’s Amber Lab از من خواستهاند که این کار را بکنم؛ چرا که این بخشی از فرآیند درک طرز راه رفتن روباتهاست و آزمون مزاحمت نام دارد.

معمولا عادت داریم روباتهای شرکتهایی مانند بوستون داینامیکس را ببینیم که میدوند، میپرند و یا حتی حرکات پارکور انجام میدهند. رباتهای Amber Lab اما فقط برای انجام دادن حرکات نمایشی طراحی نشدهاند. محققان با درک ظرافتهای راه رفتن روباتها، میتوانند یافتههای خود را در جهت ساخت دستگاههایی استفاده کنند که به افرادی که در راه رفتن مشکل دارند و یا اصلا نمیتوانند راه بروند کمک کنند.
دکتر آرون ایمس، مهندس سازه و مکانیک در موسسه فناوری کالیفرنیا، که مدیر Amber Lab است میگوید:
هدف ما این است که رفتارهایی مانند راه رفتن یا دویدن را به روباتها بیاموزیم؛ سپس از آنها برای ساخت سازههای روباتیکی استفاده کنیم که به افرادی که از ناحیه پا فلج شدهاند توانایی راه رفتن ببخشند. ما میخواهیم افرادی با این نوع ضایعات بتوانند بلند شوند و راه بروند، همانگونه که روباتهای ما این کار را میکنند.
آقای ایمس و تیمش میخواهند روباتهایشان به جای شبیهسازی و یا تقلید رفتارهای انسان، در درک قوانین ریاضی حاکم بر حرکت و راه رفتن به آنها کمک کنند. پس اگر روبات از کار بیفتد، تلاش محققان تنها این نخواهد بود که تغییراتی در آن ایجاد کنند که دوباره بتواند کار کند. او میگوید: «در این صورت ما از اول کار را شروع میکنیم و از محاسبات ریاضی و الگوریتمهایی استفاده میکنیم تا به روبات کمک کند که بتواند اشتباهات خود را اصلاح کند».
این روباتها از موتورهای الکتریکی استفاده میکنند که در مقایسه با موتورهای هیدرولیک به آنها کارکردهایی میبخشند که باعث میشوند این روباتها ابزارهای توانبخش بهتری باشند. یکی از ابزارهای توانبخشی که در این آزمایشگاه توسعه داده شده، Ampro 3 نام دارد. این ابزار برای کسانی که از زانو به پایین دچار قطع عضو شدهاند کاربرد دارد و به شخص امکان قرار دادن آن در دو حالت ثابت را میدهد. یکی از دانشجویان Ampro را میپوشد تا طرز کارش را نشان دهد. یک واحد اندازه گیری اینرسی (IMU) حرکت دستگاه را بر اساس سرعت فرد تنظیم میکند؛ در نتیجه اگر فرد تندتر راه برود Ampro نیز سرعت خود را افزایش میدهد. Ampro 3 وزنی حدود ۵ کیلوگرم دارد که کمی از وزن قسمت پایین یک پای معمولی بیشتر است.
پنجرههای بزرگی در تمام راهروهای اطراف Amber Lab قرار دارند تا رهگذران بتوانند فعالیتهای دانشجویان درون آزمایشگاه را ببینند. خود آزمایشگاه فضایی معادل دو اتاق بسیار بزرگ دارد، که در یک سمت آن فضایی کاری وجود دارد که در آن دانشجویان، بیشتر کارهای مهندسی را انجام میدهند. در زمان بازدید خبرنگار Cnet، کار بر روی ۴ روبات انجام میشد: یک روبات جهنده که به یک سری گاردریل متصل شده است، روبات Amber ،Ampro و روبات دوپای دیگری به نام Cassie که به هیچ جا متصل نیست و میتواند به طور مستقل در سه جهت حرکت کند. در سمت دیگر آزمایشگاه یک تردمیل غولپیکر وجود دارد که میتواند تا سرعت ۶۵ کیلومتر بر ساعت هم برای آزمایشهای شدیدتر افزایش سرعت داشته باشد.
هدف بلندمدت برای روباتهای Amber Lab این است که آنها هم بتوانند مانند انسان بر روی هرگونه ناهمواری راه بروند. تحقیقات مشابهی در آزمایشگاه های دیگر همچون انستیتوی کنترل انسان و ماشین فلوریدا در حال انجام است که روباتهای دوپا را قادر میسازد تا بر روی محیطهای ناهموار راه بروند.
در فضای داخلی روباتها تنها باید با تردمیلهای مسطح و یا شیبهای نه چندان تند کنار بیایند. اما در دنیای واقعی، زمین همیشه یک شکل نیست و سطح خاک دائما تغییر میکند. روباتهایی مانند Cassie برای همین هدف ساخته شدهاند. Cassie توسط Agility Robotics توسعه داده شده و دانشجویان و محققان از آن برای مطالعه تغییرات الگوریتمهای راه رفتن در محیطهای خارجی استفاده میکنند. کنترلرهای راه رفتن Cassie که توسط محققان موسسه فناوری کالیفرنیا طراحی شدهاند به آن کمک میکنند که بر روی سطوح ناصاف مانند پیادهرو، چمن و یا خاک حرکت کند. Cassie هنوز راه زیادی دارد تا بتواند بر روی برف و یا زمین خیلی ناهموار راه برود، اما ایمس و تیمش پیشرفتهایی در انتقال روباتها از شرایط کنترلشده آزمایشگاهی به دنیای بیرون داشتهاند.
کلام آخروقتی روباتهای دوپا بتوانند به صورت کاملا خودمختار مسافتهای طولانی را طی کنند، میتوان از آنها برای کاوش محیطهای غیر قابل دسترس مانند سطح مریخ استفاده کرد. نظرات خود را در پلازامگ با ما به اشتراک بگذارید.